李旭斌
(中国人民大学附属中学朝阳学校)
直轨和小车是物理实验中的常用器材,所涉及的实验包括探究小车速度随时间变化的规律,探究加速度与力、质量的关系,实验验证机械能守恒定律等.同时,涉及直轨和小车的实验还可以通过气垫导轨、拉力传感器、光电门、光电计时器等一系列器材进行改进,由此延伸出很多实验改进方案.下面,就涉及“直轨和小车”的实验方案设计及实验方案改进进行分析.
图1是同学们非常熟悉的实验装置,在实验探究加速度与力、质量关系的过程中,很多同学难以理解为什么要抬高直轨一端来平衡阻力,为什么要满足车的质量远远大于让车运动起来的槽码的质量.要解决这两个问题,首先要明确实验的主体是谁.显然是小车而不是槽码,实验是围绕探究小车的加速度与小车所受外力、小车质量的关系而进行的.
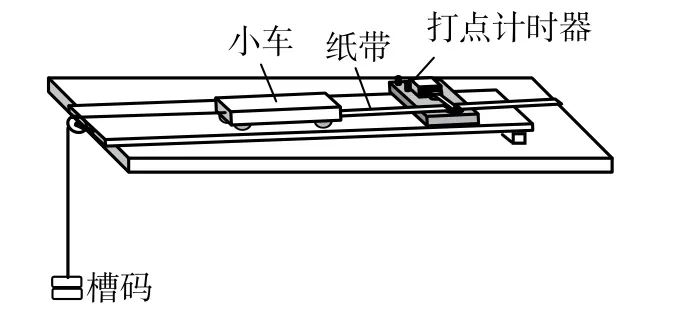
图1 探究a 与F、M 关系的实验装置
1.1 论证平衡阻力的必要性
小车沿水平直轨运动过程中,除了受到滚动摩擦外,还会受到纸带和限位孔间的滑动摩擦力、空气阻力等力的作用,因此阻力的构成多且未知.而实验过程中小车所受外力是需要量化的变量,这些阻力的存在导致不能准确量化小车所受的外力而使探究过程遇到困难.在这个实验中,阻力是不可避免的,既然不能消除阻力就只能去平衡阻力.如图2所示,如果小车所受的重力、支持力、阻力三力平衡,根据“等效替代”法,此时等价于小车不受任何力的作用,在此基础上给小车挂上细绳和槽码,那么小车所受的绳子拉力就是小车所受的合力,这样就可以用绳子拉力的大小来表示小车所受外力,使问题分析得到了极大的简化.

图2 平衡阻力
静止和匀速直线运动都属于平衡状态,为什么一定要让小车沿斜面匀速向下运动,而不采用让小车静止的方法去平衡阻力呢? 原因是静止状态下小车所受阻力不一定到达临界值.例如静止状态下纸带和限位孔之间的摩擦力是静摩擦力,阻力还有进一步增大的空间,此时阻力平衡了,不代表阻力的最大值被平衡了.挂上细绳和槽码后阻力还会进一步增大,这样用槽码重力所量化的绳子拉力就会大于小车所受外力的真实值,此时可能出现加了槽码但小车没动的现象,这是平衡阻力不充分的结果.为了更快地找到平衡最大阻力的直轨倾角,可以对倾角先粗调后细调.粗调是让小车处于刚要运动起来的状态,细调是看打点计时器记录的纸带点迹是否均匀,如果点迹逐渐变疏则适当减小倾角,如果点迹逐渐变密则适当增大倾角.
1.2 论证小车质量远大于槽码质量的必要性
本实验中小车的加速度、小车质量可以直接测量得到,在正确平衡阻力的情况下,小车所受外力即细绳拉力只能通过槽码重力进行量化,但是槽码所受重力等于细绳拉力吗? 显然不是,因为槽码带动小车做加速运动,系统存在加速度.隔离槽码进行受力分析,槽码重力大于细绳拉力,因此,严格来说用槽码重力量化小车所受外力的方法是不准确的.但原始方案中别无他法,所以只能让小车运动的加速度足够小,这样槽码重力才近似与细绳拉力等大.而让小车加速得足够慢的方法便是让小车质量足够大、惯性足够大,由此需要满足小车质量远大于槽码质量的条件.
以上是从定性的角度进行分析,如果要从定量的角度进行论证还需要借助牛顿运动定律.如图3所示,设小车的质量为M,槽码的质量为m,分别对小车和槽码进行受力分析,根据牛顿第二定律得到小车满足的方程为
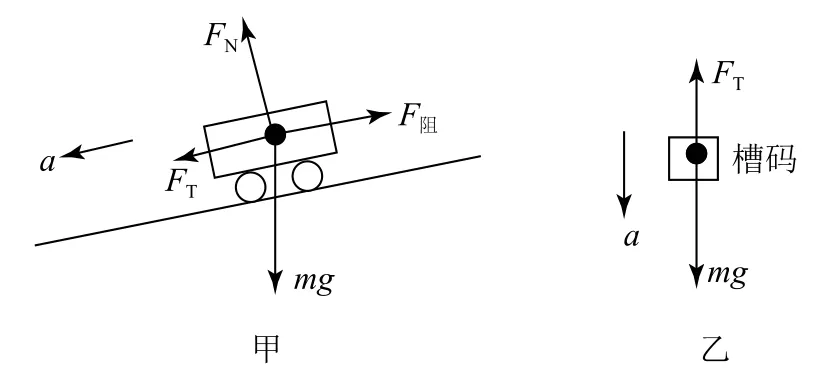
图3 隔离分析小车和槽码的受力情况
槽码满足的方程为
联立式①②,不难得到小车所受外力即细绳的拉力
当然,将小车和槽码构成的系统视为研究对象,同样能够得出式③的结论.由于实验中只能用槽码重力mg来量化细绳拉力FT的大小,因此需要借助式③寻找细绳拉力和槽码重力之间的关系,通过分子和分母同时除以M,将槽码重力在式③中单独体现出来,从而有
1.3 论证M ≫m 实验条件不满足时对图像的影响
如图4-甲所示,当小车质量远大于槽码质量的条件不满足时,为什么a-FT图像会弯向横轴呢? 根据式①③,不难得到近似情况下
根据式⑤可以得出a-F图像的斜率
根据式⑥,随着槽码质量m的不断增大,a-F图像的斜率不断减小,因此图像弯向横轴.而图像是一条过原点的直线,图像斜率为mg(如图4-乙).

图4 实验图像
1.4 通过拉力传感器对实验进行改进
如图5-甲所示,在定滑轮的下方和槽码上方的细绳处固定拉力传感器,此时可以直接测量细绳拉力的数值.那么这种情况下还需要满足小车质量远大于槽码质量的实验条件吗? 还需要平衡阻力吗?
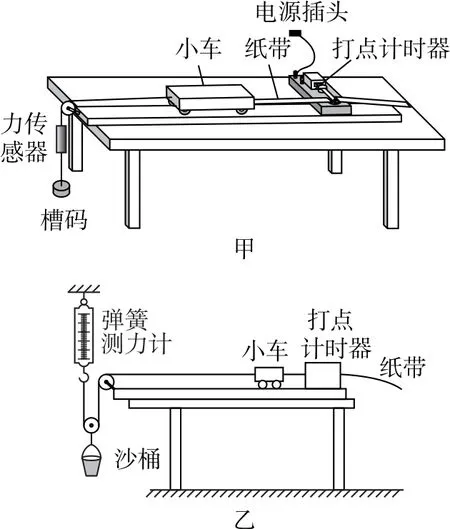
图5
当细绳拉力能够被准确测量时,就不需要用槽码重力对细绳拉力的近似,槽码的作用就仅仅是加速小车,因此通过拉力传感器对实验的改进,不需要满足小车质量远大于槽码质量这一条件了.但是,平衡阻力的步骤还是需要的,如果没有平衡阻力,即便细绳拉力测量再准确也不能量化小车所受的合力,无法定量探究.
有了拉力传感器,在探究加速度与质量关系时,如何保证细绳拉力是不变的? 如果控制槽码质量不变,随着小车质量的增加,细绳的拉力仍然会变大,因此可以用纸桶和细沙代替槽码装置,这样每增加一次小车质量,就可以通过减少纸桶内的细沙以控制较小加速度下细绳拉力不变.
以上固定拉力传感器的方法只适用于无线(蓝牙传输)传感器,而大多数拉力传感器是有线的,这样会对系统的运动造成影响.对于有线传感器,该如何改进实验装置呢? 如果手上没有传感器,只能选择测力计,而测力计必须保持静止状态,如何用测力计测量细绳的拉力呢? 如图5-乙所示,与测力计连接的细绳和与小车连接的细绳是同一根绳,此时测力计能直接测量小车所受的细绳拉力,实现在固定传感器或测力计的条件下进行测量.虽然此时可以不满足小车质量远大于沙桶质量,但平衡阻力的步骤仍然不能少.
1.5 通过气垫导轨、光电门装置对实验进一步改进
怎样改进实验装置能够不需要平衡阻力呢? 那就需要使小车运动过程中所受的阻力足够小.目前气垫导轨是实现这一设想的有效装置,气泵向气垫导轨注入空气,使导轨和滑块之间形成一层空气薄膜,滑块在导轨上运动的过程中无接触摩擦,所受的阻力很小可以忽略,因此在图5-乙中用水平气垫导轨代替直轨,用滑块代替小车,用光电门和计时器代替打点计时器和纸带,这样就不需要平衡阻力了,也不需要调节气垫导轨的倾角.
能否用超声波传感器测量滑块运动的加速度呢?超声波传感器需要依靠反射波测算滑块在不同时刻到达的位置,以此计算加速度,如果反射波不够强将无法进行测算,滑块的反射面有限,如果在滑块上加载反射板,会极大增加空气介质阻力,人为地引入阻力因素,使问题复杂化.因此正确的做法是将超声波传感器固定在滑块或小车上,将反射板固定在桌面上.
2.1 实验探究小车速度随时间的变化规律
用图1所示的装置探究小车速度随时间的变化规律,需要平衡阻力吗? 需要满足小车质量远大于槽码质量吗? 原始方案也是将直轨一端抬高,小车在槽码牵引下运动,由于该实验只需要满足小车沿直轨向下匀加速运动或沿直轨向上匀减速运动即可,并且小车速度变化的快慢在可测量范围内,因此不需要平衡阻力也能实现小车做匀变速直线运动,槽码的作用仅在于加速小车,因此也不需要满足小车质量远大于槽码质量这一条件.
2.2 实验验证机械能守恒定律
能否用图1 装置验证机械能守恒定律呢? 如果可以,需要平衡阻力吗? 需要满足小车质量远大于槽码质量吗? 自由落体运动是验证机械能守恒定律的最简单方案,然而在力学实验中验证机械能守恒的方案并不是唯一的,用图1装置仍然可以实现对该定律的验证,虽然摩擦力做功产生了机械能损耗,但在平衡阻力的情况下,小车自身重力做功与小车所受摩擦力做功代数和为零,之后挂上细绳和槽码,细绳对小车的拉力功和细绳对槽码的拉力功的代数和为零,系统在加速的过程中合力功是槽码重力做功,因此系统的机械能不变,此情况下平衡阻力是必要的.
系统由静止开始运动,假设槽码下降的高度是h,系统所受合力功是mgh,系统动能的增加量为,根据动能定理得到机械能守恒关系:
可见,在槽码上固定挡光片,由静止释放小车,测量挡光片通过光电门的速度v,测量小车和槽码的质量,测量挡光片起点到光电门距离h,便可验证机械能守恒关系.由于验证过程中不需要知道细绳的拉力大小,即不需要通过槽码重力量化细绳拉力,因此可以不用满足小车质量远大于槽码质量的条件.
当然,通过气垫导轨可以排除阻力的影响,在图1中用水平气垫导轨替代倾斜直轨,用滑块替代小车,用光电门装置替代打点计时器,这样就不需要平衡阻力,也不用满足滑块质量远大于槽码质量的条件.采用上述的整体分析法也能验证机械能守恒定律,具体过程不再赘述.
例1用如图6所示的实验装置可以探究加速度与力、质量的关系.小车上固定一个盒子(图中未画出),盒子内盛有沙子,小车的总质量(包括车、盒子及盒内沙子)记为M,沙桶的总质量(包括桶以及桶内沙子)记为m.
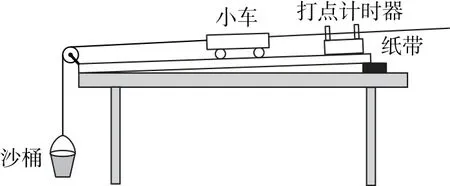
图6
(1)验证“在质量不变的情况下,加速度与合外力成正比”.从盒子中取出一些沙子,装入沙桶中,称量并记录沙桶的总重力mg,将该力视为合力F,对应的加速度a则从打点纸带中计算得到.多次改变合力F的大小,每次都会得到一个相应的加速度.以合外力F为横轴、加速度a为纵轴画出a-F图像,图像是一条过原点的直线.
①a-F图像斜率的物理意义是________.
②你认为把沙桶的总重力mg当作合外力F是否合理? 答:________(填“合理”或“不合理”).
(2)验证“在合力不变的情况下,加速度与质量成反比”.本次实验中,保持桶内的沙子质量不变,故系统所受的合力不变.用图像法处理数据时,以加速度a为纵轴,以_________为横轴,才能保证图像是一条过原点的直线.
分析(1)①根据“整体”分析法,操作过程中车、沙桶和沙子的总质量不变,此为实验过程中需要控制的变量,即控制整体的总质量不变,随着合力F的变化、整体的加速度a变化,根据牛顿运动定律不难得到
②在平衡阻力的条件下,车、沙桶和沙子构成的系统所受的合力即沙桶的总重力mg,因此该做法是合理的.
(2)在探究加速度与质量的关系时,合外力F是被控制的变量,对整体由牛顿第二定律得通过往车上的盒子里加入沙子改变系统的质量,由此得到的图像过坐标原点,因此横轴是
拓展1承接上题,如图7所示,以合力F为横轴、加速度a为纵轴画出a-F图像,图像存在纵截距,对此以下判断正确的是( ).
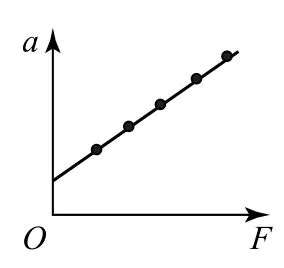
图7 实验测得的a-F 图像
A.平衡阻力时在调节斜面倾角的过程中,斜面倾角过大
B.在操作过程中,未将空沙桶的重力计入F中
C.若不满足车质量M远大于沙桶和沙的总质量m,该图像将会偏向横轴
D.若不满足车质量M远大于沙桶和沙的总质量m,该图像仍然是一条直线
答案A、B、D.
分析该实验通过将车、沙子、沙桶视为整体以控制质量不变,在平衡阻力时,可以将空桶和沙子一起放入车上的盒子中,当斜面倾角满足μ=tanθ时,实现平衡阻力,平衡条件与车质量无关,此后以沙桶和桶内沙子驱动小车沿斜面加速运动.图像产生纵截距的原因之一是平衡阻力过度,导致未加载沙桶和沙子的条件下车就有了加速度;原因之二是未将空桶的重力计入F中,因为在平衡阻力条件下,空桶可驱动车获得较小加速度,未将空桶重力计入F中,导致F=0时便有了加速度的错误结果.由于车、沙桶和沙子构成的系统所受的合力就是沙桶和桶内沙的总重力,合力F可直接通过mg进行量化,不涉及近似关系,因此该实验不需要满足M≫m的条件.
拓展2某同学在探究小车加速度a与所受合力F的关系时,设计并采用了如图8所示的方案,其操作步骤如下:①挂上砝码盘和砝码,调节木板的倾角使质量为M的小车拖着纸带沿斜面匀速下滑;②取下砝码盘和砝码,测出其总质量为m,并让小车沿木板下滑,测出其加速度a;③改变砝码盘中砝码的个数,重复步骤①和②,多次测量,作出a-F图像.

图8
(1)该实验方案________满足条件M≫m;(填“需要”或“不需要”)
(2)若该同学实验操作规范,随砝码盘中砝码个数的增加,作出的a-F图像最接近图9中的_________.

图9
答案(1)不需要;(2)A.
分析该实验方案通过减少的砝码重力量化小车所受合外力,不涉及近似关系,因此不需要满足条件M≫m.由于合力F可直接通过减少的砝码重力准确量化,随着F的增大(砝码盘中砝码的减少),图像始终为一条直线.
例2如图10所示,某实验小组在实验室中利用水平气垫导轨和两光电门计时器A和B验证滑块(质量为M)和钩码(质量为m)组成的系统机械能守恒,已知遮光条的宽度为d,先后经过A、B光电门的时间分别为Δt1、Δt2,滑块通过光电门B时,钩码未落地.

图10
(1)本实验中需要用到的器材有_________(填选项前的字母).
A.天平 B.刻度尺 C.打点计时器
D.停表 E.测力计
(2)验证本系统机械能守恒的原理表达式为_________(用已知和直接测量的物理量表示).
(3)下列因素中可能增大实验误差的是________(填选项前的字母).
A.气垫导轨未调水平
B.滑块质量M和钩码质量m不满足M≫m
C.遮光条宽度太小
D.两光电门间距过小
答案(1)A、B;
(3)A、D.
分析将钩码和滑块视为整体,整体所受合力即钩码重力mg,由于细绳对滑块做功与细绳对钩码做功代数和为零,即内力功为零,滑块重力和所受支持力合力功为零,因此仅有钩码重力对系统做功,符合机械能守恒条件.通过光电门装置可以测量滑块通过光电门A、B的速度分别为,由此得到系统动能的增加量
由于滑块重力势能不变,钩码重力势能减少,滑块从光电门A运动至光电门B的过程中,系统重力势能减少量为mgsAB,因此用来验证系统机械能守恒关系的表达式为
本题涉及质量和高度的测量,因此需要天平和刻度尺;因为绳子拉力为系统内力,且此处内力功代数和为零,因此不用考虑绳子拉力,该实验不涉及钩码重力与绳子拉力的近似关系,所以不需要满足条件M≫m;气垫导轨未调水平会导致滑块重力做功,对机械能守恒关系式造成影响,增大实验误差;由于遮光条宽度已知,因此其宽度越小、瞬时速度测量值越准确,如果遮光条宽度未知,注意宽度小到瞬时速度测量值达到稳定即可,如果宽度太小在测量过程中会增大读数的偶然误差;光电门间距过小会导致动能增量不明显,钩码下降高度不明显,从而增加测量误差.
直轨和小车看似普通,但涉及多个高考力学实验,同学们在进行实验方案设计的过程中不仅要知其然,更重要的是知其所以然;不仅要定性分析,还要会定量推导,这样才能更有针对性地去改进实验方案.高考可以这部分内容为抓手,对科学探究素养的问题、证据、解释、交流要素,以及科学思维素养的科学推理、科学论证、质疑创新要素进行考查.
(完)
猜你喜欢细绳拉力滑块细绳“钓”冰块哈哈画报(2022年1期)2022-04-19绕着绕着,飞了动漫界·幼教365(中班)(2021年1期)2021-04-06基于CFD的螺旋桨拉力确定方法航空发动机(2020年3期)2020-07-24自不量力发明与创新·中学生(2018年2期)2018-02-07杯子有多深小学生学习指导(中年级)(2017年12期)2017-11-09跟踪导练(三)(3)时代英语·高二(2017年4期)2017-08-11等动拉力和重力拉力蝶泳划臂动作生物力学分析天津体育学院学报(2016年3期)2016-12-18前模滑块注射模设计中国塑料(2015年9期)2015-10-14斜滑块内抽芯塑件的注射模具设计河南科技(2015年2期)2015-02-27滑块分拣系统在我国烟草行业中的应用河南科技(2014年3期)2014-02-27


